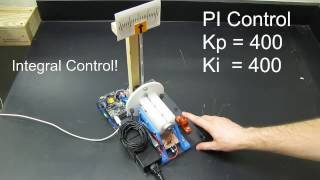
Web Reference: Where u (t) u(t) is equal to the output given to the actuator, which in this case is a motor. e (t) e(t) is the error in the system, which is (D e s i r e d A c t u a l) (Desired−Actual) On the left, you can see the four terms of the equation separately, which will better help you see what components of PID are contributing, and in what ways. This simulator allows you to visualize the response of a system by adjusting the parameters of a PID controller (Proportional, Integral, Derivative). Adjust the values of (K), (K_I), and (K_D) using the sliders. Observe the response of the system in real time to analyze the impact of each parameter. This PID control simulator allows you to try out a PID controller interactively by adjusting the tuning parameters in realtime. Also, you can adjust the process model by Javascript code below.
YouTube Excerpt: For those not in the know,
Information Profile Overview
Pid Controller Demonstration - Latest Information & Updates 2026 Information & Biography

Details: $5M - $24M
Salary & Income Sources
Career Highlights & Achievements









Assets, Properties & Investments
This section covers known assets, real estate holdings, luxury vehicles, and investment portfolios. Data is compiled from public records, financial disclosures, and verified media reports.
Last Updated: April 3, 2026
Information Outlook & Future Earnings

Disclaimer: Disclaimer: Information provided here is based on publicly available data, media reports, and online sources. Actual details may vary.